引言
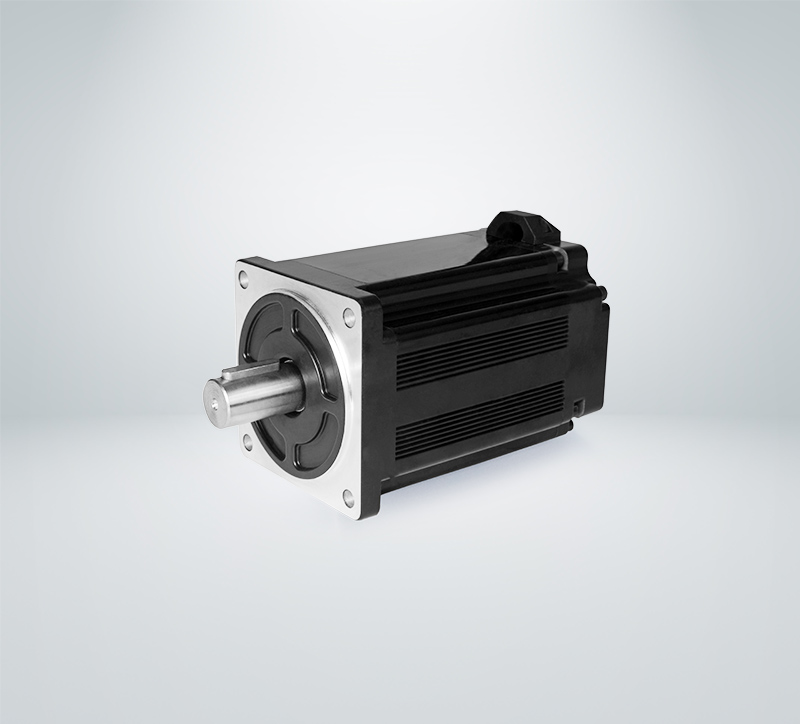
伺服電機驅(qū)控一體化是一種將伺服電機與驅(qū)動控制器集成在一起的技術(shù)。它可以提高機器人操作的精度和性能。本文將探討伺服電機驅(qū)控一體化對機器人操作精度的影響。
一、伺服電機驅(qū)控一體化的工作原理
伺服電機驅(qū)控一體化將伺服電機和驅(qū)動控制器集成在同一設(shè)備中。該設(shè)備能夠?qū)崟r監(jiān)測電機的位置、速度和力矩等參數(shù),并通過驅(qū)動控制器對電機進行的控制。這種一體化的設(shè)計使得電機和控制器之間的通信更加高效,減少了延遲和誤差。
二、提高機器人操作精度的優(yōu)勢
1. 高精度控制:伺服電機驅(qū)控一體化系統(tǒng)通過實時監(jiān)測和控制電機的位置和速度,使得機器人的動作更加和穩(wěn)定。這對于一些需要高精度定位和運動的應(yīng)用非常重要,例如裝配、醫(yī)療手術(shù)等。
2. 快速響應(yīng)能力:伺服電機驅(qū)控一體化系統(tǒng)具有快速響應(yīng)的特點,可以實時調(diào)整電機的輸出力矩和速度,以滿足不同任務(wù)對動作的要求。這樣,機器人可以更加靈活地適應(yīng)不同工作場景并提高操作精度。
3. 高可靠性:伺服電機驅(qū)控一體化系統(tǒng)集成了驅(qū)動控制器和電機,減少了電機與控制器的連接點,降低了故障的可能性。這提高了機器人系統(tǒng)的可靠性和穩(wěn)定性,確保操作精度的持久性。
三、伺服電機驅(qū)控一體化在機器人操作中的應(yīng)用案例
1. 自動化生產(chǎn)線:在自動化生產(chǎn)線中,伺服電機驅(qū)控一體化可以實現(xiàn)高精度的物料搬運、裝配和檢測。它可以控制機械手臂的位置和速度,確保產(chǎn)品質(zhì)量和生產(chǎn)效率。
2. 醫(yī)療手術(shù)機器人:醫(yī)療手術(shù)機器人需要高精度的操作來進行微創(chuàng)手術(shù)。伺服電機驅(qū)控一體化可以提供的手術(shù)工具運動控制,確保手術(shù)的準(zhǔn)確性和安全性。
3. 物流機器人:物流機器人需要在復(fù)雜的環(huán)境中進行準(zhǔn)確的位置和運動控制。伺服電機驅(qū)控一體化可以實現(xiàn)自適應(yīng)算法和的運動軌跡規(guī)劃,提高機器人的操作精度和效率。
四、伺服電機驅(qū)控一體化的發(fā)展趨勢
隨著機器人技術(shù)的不斷發(fā)展,伺服電機驅(qū)控一體化系統(tǒng)將進一步提升。未來的發(fā)展趨勢包括:
1. 更高的精度:伺服電機驅(qū)控一體化系統(tǒng)將提供更高的精度控制,以滿足不斷提升的應(yīng)用需求。
2. 更好的響應(yīng)能力:伺服電機驅(qū)控一體化系統(tǒng)將具備更快的響應(yīng)速度和更的控制,以適應(yīng)更復(fù)雜的任務(wù)環(huán)境。
3. 更強的集成能力:伺服電機驅(qū)控一體化系統(tǒng)將實現(xiàn)更多的功能集成,例如傳感器、通信接口等,提供更便捷和全面的解決方案。
五、結(jié)論
伺服電機驅(qū)控一體化可以提高機器人操作的精度。它通過實時監(jiān)測和控制電機的位置、速度和力矩等參數(shù),使機器人的動作更加和穩(wěn)定。在自動化生產(chǎn)線、醫(yī)療手術(shù)機器人和物流機器人等領(lǐng)域已有成功的應(yīng)用案例。未來隨著技術(shù)的發(fā)展,伺服電機驅(qū)控一體化系統(tǒng)將進一步提升,為機器人操作提供更高的精度和性能。
TAG:
10kva伺服電子變壓器 |
15kva伺服電子變壓器 |
15mm伺服電機 |
1kva伺服電子變壓器 |
2000w伺服驅(qū)動器 |
20kva伺服電子變壓器 |
220v伺服電子變壓器 |
2kva伺服電子變壓器 |
2kw伺服電子變壓器 |







